
* The previous chapters focused mostly on motion in a straight line. The same principles apply to rotational motion, but end up being reinterpreted in some interesting ways. This chapter provides a short study of the physics of rotational motion.
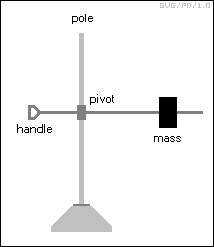
* To consider rotational motion, let's imagine that Bob has built a test apparatus, consisting of a mass linked to a rod that can be pivoted around a pole. The mass is very compact, so its size and shape can be disregarded. The mass of the rod is small and can be ignored.
The rod spins the mass around the pole in a circle at a rate of, say, six meters per second. For the purposes of this discussion, we can refer to this measure of velocity as the "linear velocity" of the mass, though of course the line is circular, not straight. We define this as linear velocity in order to introduce a different concept of velocity applicable to rotational motion, known as "angular velocity". If the mass is positioned on the rod one meter from the pole, then the circular path length of the mass is one meter times 2PI (two times pi), or about 6.28 meters. That means that the number of revolutions the mass makes around the pole in one second is:
mass_velocity / ( 2PI * rod_length ) = 0.955 revolutions per second
This defines the angular velocity of the mass as 0.955 revolutions per second. In general, we can define angular velocity as follows:
_________________________________________________________________________ angular_velocity = linear_velocity / ( 2PI * radius ) _________________________________________________________________________
-- with angular velocity given in revolutions per second. Notice the clear difference between linear velocity and angular velocity:
Suppose that the mass can be slid forward and back along the rod, and that it Bob moves it in so that it's only half a meter from the pole. Suppose further that the rod continues to rotate at the same rate. That means that although the angular velocity is the same, 0.955 revolutions per second, the linear velocity has been cut in half, to three meters per second. Similarly, suppose Bob moves the mass out along the rod until it's two meters from the pole, and once again the rod continues to rotate at the same rate. The angular velocity is still the same, but the linear velocity has doubled, to twelve meters per second.
* Angular velocity is not normally measured in revolutions per second. The popular unit for angular velocity is "revolutions per minute (RPM)", and of course all that needs to be done is multiply revolutions per second by 60 to get revolutions per minute. For the example above, the RPM amounts to 60 * 0.955 = 57.3 RPM.
However, RPM isn't a very convenient unit for performing calculations. A somewhat more convenient unit for angular velocity is degrees per second, with 360 degrees in a circle. To get degrees per second, all that needs to be done is multiply the revolutions per second by 360. For the example above, the mass has an angular velocity of 360 * 0.955 = 344 degrees per second.
Degrees are a unit of angular measurement, and though we have defined angular velocity as the number of revolutions per second, the term "angular velocity" itself suggests that it's more properly defined as the change in angle per second. The two definitions are equivalent, with the first being more intuitive and the second being more useful for calculations.
In practice, from the point of view of calculations, there is an even more convenient unit for angular measurement than degrees, known as "radians". One radian is just the length of one radius of a circle along the circumference of that circle, and so there are 2PI, or about 6.28, radians in a circle. Degrees are in popular use and so are generally more intuitive than radians, but radians make rotational calculations much more consistent and easy to handle. For example, if angular velocity is expressed in radians, then its definition is simplified to:
angular_velocity = linear_velocity / radius
The final result of calculations can be converted into RPM or degrees per second if need be, and the conversion calculations are very simple:
RPM = 60 * radians / 2PI degrees per second = 360 * radians / 2PI
Angular velocity may seem somewhat awkward at first sight, but a moment's thought shows how convenient it is. It is much simpler to describe the rotation of a helicopter's rotor as say, 200 RPM, than it would be to describe it in terms of the linear speed of the rotor tips, as 452 kilometers per hour.
Of course, if we can define a quantity such as angular velocity, we can also define the related quantities of "angular displacement", or the number of radians a revolving object has moved through; and "angular acceleration", or the rate of change of angular velocity, in radians per second per second.
BACK_TO_TOP* Defining the concept of angular velocity, as opposed to linear velocity, suggests that other quantities useful in rotational motion can also be defined that are comparable to fundamental quantities in linear motion. In fact, there's a complete and self-consistent system of quantities for rotational motion.
The basic rules for linear motion are provided by Newton's three laws of motion, and define the basic quantities of force, mass, and acceleration. We can redefine the three laws for rotational motion by defining:
The definitions of torque, moment of inertia, and angular momentum are intertwined, so I'll give all three definitions, and then explain them in detail in the following sections.
Torque is obtained by multiplying the tangential force that sets an object spinning times the length of the lever arm, or radius, on which the force acts relative to the center of rotation of the object:
_________________________________________________________________________ torque = force * radius _________________________________________________________________________
The moment of inertia, at least for a simple system like the mass on a rod used in the previous section, is given by:
_________________________________________________________________________ moment_of_inertia = mass * radius^2 _________________________________________________________________________
We'll discuss how this definition is extended for more complicated systems later. For now, just accept that this definition is the truth, just not the whole truth. By the way, moment of inertia is sometimes called "rotational inertia", but that term isn't used here.
The definition of moment of inertia leads to the definition for angular momentum:
_________________________________________________________________________ angular_momentum = moment_of_inertia * angular_velocity _________________________________________________________________________
The quantities of energy, work, and power remain the same in rotational motion as they are in linear motion, though their definitions are modified as shown below.
* The "center of rotation" mentioned above is better known as the "center of mass". For any object that is symmetrical around its spin axis, the center of mass is the physical center of the object. However, if the object is not symmetrical, the center of mass is where the object would balance if hung by a thread, using the simple rules of lever balance outlined in the previous chapter to determine the point where the forces from the two masses balance out. For example, consider an object that looks like a barbell, with a 15-kilogram mass M1 at one end, a 3-kilogram mass M2 at the other, and with a connecting rod of negligible mass 1.3 meters long between them.
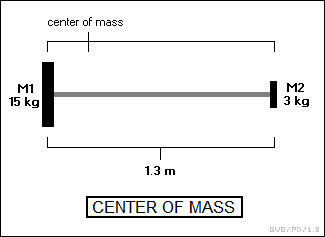
The balance point X as measured from M1 is then given by:
M1 * X = ( 1.3 - X ) * M2 M1 * X + M2 * X = 1.3 * M2 X * ( M1 + M2 ) = 1.3 * M2 X = 1.3 * M2 / ( M1 + M2 ) = 1.3 * 3 / ( 15 + 3 ) = 0.22 meters.
This same "balancing" approach could be extended to an assembly of masses in two or three dimensions, but although the math is not complicated, it can be long-winded, and so will not be discussed further here.
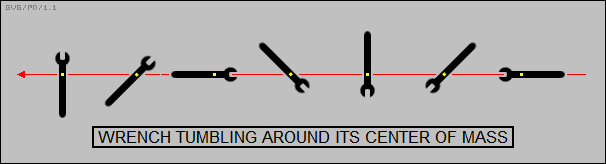
Center of mass is an important concept. For example, if Bob is in outer space and throws a wrench so that it tumbles as it flies, its center of gravity will travel in a perfectly straight line. If Bob is on Earth and throws a wrench so that it tumbles around, the wrench's center of mass will follow a smooth arc of the object's flight even as the rest of the object tumbles around that arc.
The location of the center of mass defines the stability of an object. Suppose Bob has a block of wood of uniform density that is, say, ten centimeters long and wide, and two centimeters tall. If the block is laid flat, standing two centimeters tall, there is no way to tip it over by pushing it on one side or another. The block lying flat is said to be in "stable equilibrium": trying to tip it raises the center of gravity.
Now suppose the block is stood on its side, standing ten centimeters tall. If Bob pushes it at the top, then if the block tilts beyond an angle where the line from the center of gravity falls outside the base of the block, it falls over. The block standing up is said to be in "unstable equilibrium": beyond the threshold of no return, pushing on it lowers the center of gravity and it has no place to go but down.
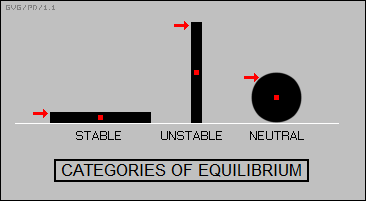
That is why high-riding sports / utility vehicles are much easier to roll than low-to-the-ground sports cars. It is also possible to have "neutral equilibrium", for example in a sphere of uniform density: pushing and prodding on the sphere doesn't affect the position of the center of gravity in the least.
BACK_TO_TOP* The best way to understand torque, moment of inertia, and angular momentum is to see how Newton's three laws of motion are restated in a rotational context. It might seem logical to start with the first law of motion, which is the law of conservation of momentum, expressed with the definition for linear momentum:
linear_momentum = mass * linear_velocity
The definition of angular momentum is exactly comparable:
angular_momentum = moment_of_inertia * angular_velocity
However, understanding the mechanisms of angular momentum means understanding the concept of moment of inertia as well as a few other subtleties, so an understanding of the first law in a rotational context will have to be put off for a bit.
That means the best first step is to consider the second law of motion. In the linear context, this is given by:
force = mass * linear_acceleration
In the rotational context, the equivalent expression is:
torque = moment_of_inertia * angular_acceleration
The two expressions are actually equivalent. The equivalence can be easily seen by considering the simple system described earlier, with a mass rotating at a certain radius on a rod, and the force causing the torque operating directly on the mass at that radius. Then we can restate the rotational version of the second law as follows:
torque = moment_of_inertia * angular_acceleration force * radius = mass * radius^2 * angular_acceleration force = mass * radius * angular_acceleration force = mass * ( radius * angular_acceleration ) force = mass * linear_acceleration
The underlying physical principles established for rotational motion haven't changed -- they've just been restated in a different form.
* This shows the equivalence between the force and torque, but it doesn't really explain the concepts of torque and moment of inertia.
The concept of torque is fairly easy to understand. To get something to spin, Bob has to push it along a direction at a right angle to the radius of rotation. Any force in the direction of that radius might get the entire rotating system to move in a straight line if it's not bolted down, but it won't contribute to rotation.
Suppose Bob takes a rotating disk with a hex nut in the center, and uses a wrench to get it to rotate. He applies a torque equal to the force he exerts on the wrench times the length of the wrench. Considering the discussion of levers in the previous chapter, obviously the same force will have a greater effect if the wrench is longer. It's just simple mechanical advantage, exerting a smaller force over a longer path to obtain the same amount of work. This means that the force actually exerted on the rotating disk, and so its angular acceleration, is proportional both to the length of the lever arm and the force exerted at the end of that lever arm.
One of the peculiarities of torque is that it's measured in units of force times displacement, or "newton-meters" in metric. Work is also measured in the same units. Does this imply that they're the same thing?
No, it doesn't; in fact, they're literally sideways to each other. Force is a vector quantity; work is force on an object in the direction of its motion. Torque is exerted at a right angle to a radius, and there's no motion along the radius.
* Moment of inertia is a bit harder to understand. Let's consider our simple example again of a sliding mass on a rod, but now let's say the rod has an extension a meter long on the other side of the axis, with a handle on it that Bob can push on to cause rotation.
Let's suppose that the mass is positioned on the rod a meter away from the axis. If Bob pushes on the handle, the same linear force acts on the mass on the other side of the axis, and the mass accelerates just as the second law says it does.
Now Bob moves the mass out to two meters and pushes on the handle. Since the mass moves twice as far as the handle, it only receives half the force at any one time, and its linear acceleration is only half as great as it was at one meter. This means he has to push twice as hard to achieve the same linear acceleration.
However, what we're after here is not linear acceleration, but angular acceleration, a change in RPM. If he doubles the radius to two meters, as noted, he has to push twice as hard to get the same linear acceleration, but now the circular path along which it moves is twice as long. Even given the same linear velocity in the two positions, the angular acceleration is only half of what it was for the same linear velocity when the radius was one meter.
That means that to obtain the same angular acceleration when the mass is moved from one meter to two meters, Bob has to push four times as hard, or proportionally to the square of the radius. This leads back to the original definition of moment of inertia:
moment_of_inertia = mass * radius^2
Once again, the same physical laws apply, they're just restated in a different form.
BACK_TO_TOP* As noted earlier, the initial definition of moment of inertia:
moment_of_inertia = mass * radius^2
-- was only for the simple mass on a rod, and was not exactly true for other cases. Let's consider a more complicated example, where the object whose moment of inertia we want to calculate has several different masses of different size, each at a different distance from the axis of rotation of the object. This leads to a more general definition for moment of inertia:
_________________________________________________________________________ moment_of_inertia = SUM( mass * radius^2 ) _________________________________________________________________________
In simple terms, the moment of inertia of the entire object is the sum of the moments of inertia of its components. If the object had three different masses, each at a different distance from the axis of rotation, then the moment of inertia of the object is:
moment_of_inertia = mass1 * radius1^2
+ mass2 * radius2^2
+ mass3 * radius3^2
Let's consider more specific examples, such as a barbell with weights connected by a rod. Ignoring little details like the weight of the rod, if each weight has a mass Mi and the rod has a length L = 2 * R, then its moment of inertia for rotation around the midpoint of the rod is:
2 * Mi * ( L/2 )^2 = 2 * Mi * R^2
If we designate the sum of the mass of the weights as Ms, then this becomes
Ms * R^2
If we have a pair of rods of length L = 2 * R joined in a cross, with weights with mass Mi at each end of the rods, then the moment of inertia for rotation around the center of the cross is:
4 * Mi * R^2
-- or once again:
Ms * R^2
In fact, this moment of inertia also applies to any thin ring or hollow thin cylinder rotating around its axis. They're exactly the same as the barbell in this respect because we still have a mass at a particular radius, and it makes no difference if it's two individual masses or a continuous ring.
Calculating moments of inertia for other objects generally requires more math than is appropriate in this document, but a short list of the moments of inertia of a few different objects of mass M will help give a better feel for the concept.
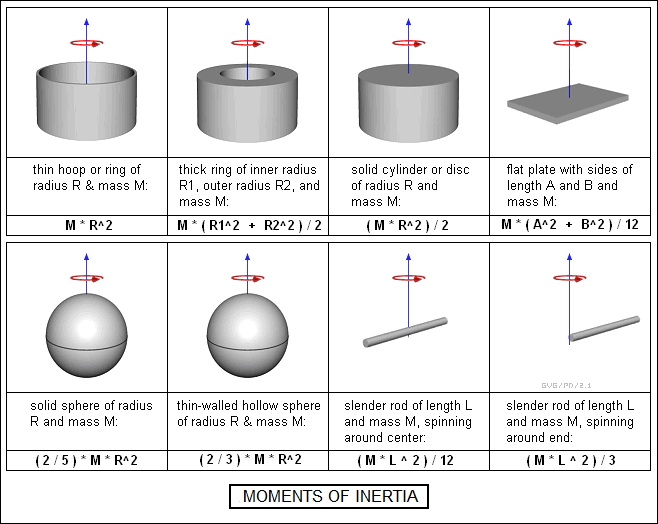
* The concept of moment of inertia makes a certain amount of intuitive sense. For example, it's much easier to rotate a barbell if the weights are close together on the bar instead of at the ends. Similarly, if Alice is walking a tightrope, she might carry a long pole held tightly in her hands to provide balance. The longer the pole, the greater its moment of inertia, which prevents Alice from tipping over.
In other cases, it's not as intuitive. Suppose Bob has two cylindrical masses, one in the form of a hollow cylinder and the other in the form of a solid cylinder. Incidentally, they don't need to have the same diameter or the same mass. If Bob drops these two cylinders from the same height, as emphasized in the last chapter, ignoring drag they'll hit the ground at the same time. If he were to put these two cylinders on end on top of a ramp and let them slide down, if the ramp is very slick, once again they'll reach the bottom at the same time.
Now if Bob rolls these two objects down a plane, the solid cylinder will always beat the hollow cylinder. This is because the hollow cylinder has a greater moment of inertia, and its angular acceleration is lower for a given force. The relative sizes of the two cylinders don't matter any more than it does for dropping them, because the force required to get them to move is proportional to the mass, but the hollow cylinder just can't get rolling at the same rate as the solid cylinder.
BACK_TO_TOP* After considering the second law of motion in a rotational context, it is almost too easy to consider how the third law fits in. Obviously, if Bob generates a torque on a rotating system, the same torque is produced on him in the opposite direction.
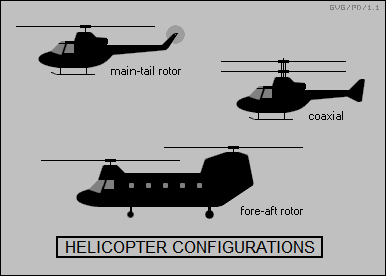
This is most obvious in the case of a helicopter. A helicopter spins a rotor at high speed in one direction, which means that it tends to spin in the other direction. This is why most helicopters have a little rotor attached on the side of the tail, just to stop the machine from spinning; the British call this a "penny-farthing" configuration, after the antique bicycle with the oversized front wheel. There are other approaches to perform the same trick. Some large cargo helicopters have rotors on both ends, spinning in different directions. Yet another scheme is the "eggbeater" configuration, with twin rotors meshing in a side by side configuration, or the "coaxial" configuration, with one rotor sitting on top of the other but the two rotating in opposite directions.
There is a way around the problem entirely. Some helicopters have been designed with little jet thrusters of one sort or another on the end of the rotor blades, with fuel passed up from the helicopter through the rotor blades. This causes the rotor to turn itself, and eliminates the need to cancel torque. However, for various reasons, apparently fuel consumption and noise, no "tipjet" helicopter has been produced in quantity to this time.
Coaxial propellers were also used on some of the very last propeller-driven fighter aircraft. These aircraft had such powerful engines that they generated an enormous amount of torque that made the aircraft very hard to control, and so they were often fitted with "contra-rotating" propellers, with two sets of blades turning in opposite directions, driven by the same engine using a wheels-within-wheels "planetary gear" transmission. A "contraprop" also permitted the propeller to make effective use of the high engine power without requiring a propeller of excessive diameter.
In addition, twin-engine propeller-driven aircraft often had their two propellers turning in opposite directions to cancel out the effects of torque. This wasn't always done, because it meant that the aircraft required two different types of engines, one "left-handed" and the other "right-handed", which complicated maintenance. Flying an aircraft with high-powered handed engines could be tricky, since if one engine failed on take-off, the other would tend to roll the aircraft over on its back.
* It is also easy to see that the expression for work in the rotational context is similar to the expression for work in the linear context:
_________________________________________________________________________ work = torque * angular_displacement _________________________________________________________________________
-- and in fact the two expressions are equivalent:
work = torque * angular_displacement
= force * radius * angular_displacement
= force * linear_displacement
Going back to the example of a mass on a rod rotated around a pole by a one-meter extension with a handle on the other side, then pushing the handle over an arc a meter long with a force of a newton does a joule of work. It doesn't matter how far out along the rod the mass is, the work done on the mass is the same as the work done on the handle.
The expression for kinetic energy in the rotational context is also similar to the expression for kinetic energy in the linear context:
_________________________________________________________________________ kinetic_energy = ( 1/2 ) * moment_of_inertia * angular_velocity^2 _________________________________________________________________________
-- and again, the two definitions are equivalent:
kinetic_energy = ( 1/2 ) * moment_of_inertia * angular_velocity^2
= ( 1/2 ) * mass * radius^2 * angular_velocity^2
= ( 1/2 ) * mass * ( radius * angular_velocity )^2
= ( 1/2 ) * mass * linear_velocity^2
Kinetic energy is due to mass moving at a certain linear velocity. It doesn't matter if the velocity in a straight line or in a circle, the kinetic energy is the same.
BACK_TO_TOP* We now have a good grasp of the second and third laws of motion in the rotational context, and so it might seem time to go back and nail down the first law. However, we end up having to take yet another side trip before we can do that, and consider the forces on a rotating object.
As explained in the previous chapter, an object moving along a straight line at a certain velocity will continue to do so unless a force acts on it. A mass revolving in a circle is always changing direction, which means there is a force on it causing it to do so. If terms of our simple mass-on-rod example, the rod exerts a force on the mass, directed towards the pole. This is known as "centripetal force", and it is always directed towards the center of rotation.
The concept of centripetal force sounds very much like the more popular notion of centrifugal force. Centrifugal force is what most people recognize as the force that they feel in the well-known "Tornado" carnival ride in which they are placed in a big spinning drum whose floor drops out once the passengers are pinned to the walls, or the force that squeezes the water out of clothes in washing machine during its spin dry cycles.
In fact, centrifugal force is just a parochial way of perceiving centripetal force. Riders in the Tornado feel a centrifugal force pressing them to the walls, and don't see the bigger picture of centripetal force: the spinning drum is essentially trying to throw off its passengers in a straight line, but the arc of the walls keeps forcing them back inward. During the washing machine's spin dry cycle, the water just keeps going out the holes in the basket in a straight line, while the basket pulls the clothes themselves into a spinning curve at a rapid rate.
From a casual point of view the distinction is small -- but physicists get fussy about it, since using centrifugal force in the mathematical analysis of a rotating system tends to be awkward at best. It's very similar to believing that the Sun orbits around the Earth every day, which it seems to from our parochial point of view as we watch it rise and set, when the reality is that the Earth is spinning around on its axis. However, most people don't understand the term centripetal force, and that leads to a simple rule: use the term "centrifugal force" in casual conversation and "centripetal force" in a technical context. Anyone who understands the distinction will understand; anyone who doesn't won't care, and trying to explain it to them is pointless.
* One application of centripetal force is to provide artificial gravity in spacecraft. Back in the 1950s and 1960s, space stations were generally seen as big rotating wheels, spinning to create artificial gravity, as in Stanley Kubrick's movie 2001: A SPACE ODYSSEY. (This particular design actually had two wheels on a common axis and spinning in opposite directions, canceling the angular momentum of the station as a whole and making it easier to reorient.)
2001 has come and gone and no such thing happened, but the idea remains valid. A similar but less ambitious concept is to link a pair of spacecraft by a long cable or "tether" and set them to spinning around each other. This may need to be done on a long Mars mission or other expedition where people would otherwise be in weightless condition for long periods of time. People who spend long periods of time in weightless conditions have to be retrained to walk when they return to Earth, and it would make no sense to land astronauts on Mars and then wait a few weeks for them to condition themselves until they were actually able to get around.
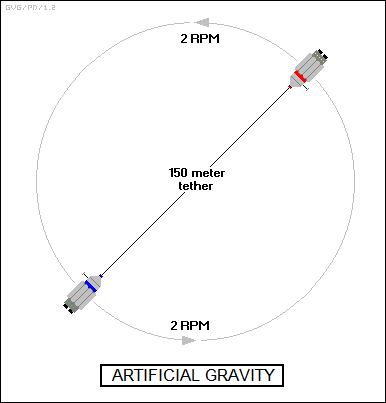
Suppose the tether is 150 meters long, giving each spacecraft a distance from the center of their mutual rotation of 75 meters, and the spin rate is 2 RPM, or one rotation every 30 seconds -- that being roughly the maximum rotation rate that human beings can tolerate without suffering from vertigo or nausea. The formula for centripetal acceleration, given here without derivation, is:
_________________________________________________________________________ centripetal_acceleration = radius * angular_velocity^2 _________________________________________________________________________
Plugging in the quantities:
75 * ( 2PI / 30 )^2 = 3.29 meters per second
This is about a third of Earth gravity, which would be fine for a Mars mission, since the surface gravity on Mars is only about a third of the Earth's.
Since setting two spaceships in motion on a tether complicates maneuvering, another scheme has been proposed, in which a spacecraft carries a centrifuge to condition the astronauts for a session each day. Incidentally, Earth-based centrifuges were used in test and training for astronauts in the early days of space flights, and one of the results of this effort was to characterize just how many gees of acceleration a human being could stand. An astronaut would ride in a capsule on a couch designed to conform to his body, with his back to the outside of the arc; above about six gees he wouldn't be able to lift his arms out of the couch. Above 16 gees it was almost impossible to keep from blacking out, though one researcher did 20 gees for a short time on a dare. Astronauts would have their backs mottled from broken blood vessels after a ride on the centrifuge.
The centrifuge used by the Americans also had the interesting feature that the capsule could be flipped around so the astronaut would then be facing the outside of the arc; they called this routine "eyeballs in, eyeballs out". An astronaut's head had to be strapped to the couch so he wouldn't break his neck when the capsule flipped over. The maximum limit for such a transition was about nine gees.
BACK_TO_TOP* The physics of rotational motion also introduces a number of elaborations to the physics we learned for linear motion. The basic physical rules stay the same, but new games are played.
For example, let's return to our moving mass on a rod, rotating around a pole. In the previous example, Bob moved the mass in and out, keeping it at the same angular velocity. In reality, the mass wouldn't stay at the same angular velocity as it moved in or out, unless the rod was being driven from the pole or its tip.
Let's see what actually happens if Bob moves the mass in or out in or out, and the mass is not being driven. If the mass is moving at a linear velocity of six meters per second when it is one meter from the pole, and it is moved to a half meter from the pole, assuming no friction or other forces on the rod or mass, the law of conservation of momentum ensures that the mass will continue to move at six meters per second.
Since the radius of the circle has been cut in half, so has its circumference, and the mass now revolves around the pole at twice the angular rate that it did when it was a meter from the pole. Moving the mass inward causes the angular velocity to increase. Similarly, if the mass moves out along the rod until it is two meters from the pole, in the absence of any external forces it is still moving at six meters per second, but the circle is twice as big. The angular velocity is now cut in half. Moving the mass outward causes the angular velocity to decrease.
* This is an example of the principle of the "conservation of angular momentum", or Newton's first law of motion applied to rotational motion. There's no new fundamental principle involved, it's just the implications of the conservation of linear momentum applied to a rotational system, but using the same basic rules in a different game gives different results.
There are many practical examples of the law of conservation of angular momentum. A very popular example is to visualize Alice on ice skates going into a spin. As she goes into the spin, she leaves her arms spread out wide, and the spin is slow, but as she draws her arms in to herself, she spins faster and faster. When she spreads her arms out wide again, the spin slows down.
A more cosmic example is the formation of a "neutron star". A neutron star is a very small but dense star, the size of a mountain but as massive as a star like the Sun. It is created as a "cinder" left over from a "supernova", an explosive collapse of a star much bigger than the Sun. The supernova explosion blasts off the outer layers of the star, while the star's interior falls inward to create the neutron star.
As the interior falls inward, conservation of angular momentum causes the rate of rotation to increase, and after the explosion the neutron star is spinning very fast, much faster than the oversized star that gave it birth. Young neutron stars often have "hot spots" that generate radio noise, and so they emit radio pulses as they spin, bringing the hot spot in and out of view. Such a "pulsing" neutron star is known as a "pulsar". A spinning neutron star loses angular momentum through indirect forces over time, slowing down its spin. Astronomers can roughly estimate the age of a pulsar by its spin rate.
In the case of Alice going into a spin on her skates, or a star collapsing into a neutron star, there's an existing spin rate that is increased by reducing the radius. Another aspect of conservation of angular momentum is that it obeys the law of action and reaction: angular momentum produced in one direction has to be balanced by angular momentum in the other so the net sum is still zero. Bob doesn't have much trouble twisting around while he's standing on the ground, since the massive Earth easily soaks up the reaction, but if he's trying to twist around when his feet are stuck to a small freely floating or rotating platform, it's not so easy: if he shifts his upper body in one direction of rotation, the platform will twist around in the other direction.
When astronauts first tried to perform work in space outside of a spacecraft, they found that conservation of angular momentum made life very difficult for them. If they tried to turn a bolt one way, they would spin around in the other. This was one of those things that should have seemed obvious in hindsight, but nobody had quite thought things through ahead of time. The solution was straightforward: fit a spacecraft with handholds, footholds, railings, and the like to allow the astronaut to have something to hang on to. One particularly ingenious scheme was later introduced with the US space shuttle, which had a long robot arm. The arm could be fitted with a foothold platform that an astronaut could stand on, with an operator moving the astronaut around as needed as an extension of the arm.
* Another example of the conservation of angular momentum is known as the "Coriolis effect". If Bob stands at the North Pole, properly dressed for the weather, and points a finger straight out in front of him, his fingertip will trace out a full circle in 24 hours. Now he goes to the equator, discards his parka in favor of a Hawaiian shirt, and hold his finger straight up over his head, it will also trace out a full circle in 24 hours. However, at the Pole, the actual distance traveled by his finger in 24 hours is a little over six meters, while at the equator it's about:
PI * 12,750 = 40,055 kilometers
The angular velocity is the same in both places, but the actual linear speed along the circular path is very much greater at the equator, since the distance between Bob and the Earth's axis of rotation is very much greater as well.
Similarly, suppose Bob fires a cannon at a high northern latitude with the gun pointed due south, so that the cannonball arcs high through the sky towards the equator. The cannon is moving from west to east along with the rotation of the Earth, and of course the cannonball has the same sideways motion once it's fired. This isn't noticeable at short range, since everything in the vicinity is moving from west to east at effectively the same rate. Farther south, however, the distance of the cannonball from the Earth's axis of rotation will increase, and the linear velocity of the Earth's surface underneath the cannonball will increase accordingly.
The cannonball will start to lag behind the Earth's rotation, curving to the west. This is the Coriolis effect, named after the French physicist Gaspard de Coriolis (1792:1843). It has to be calculated for missile and spacecraft launches, and is particularly important in weather studies, since it has a definite effect on air or cloud masses moving north or south. One of the interesting subtle results of the Coriolis force is that large cyclonic storms rotate counterclockwise in the Northern Hemisphere, and clockwise in the Southern Hemisphere.
There is also a folk tale that the whirlpools formed when sinks and bathtubs are drained have different spins in each hemisphere, but Coriolis forces are too subtle to have any measurable effect at such a small scale, and demonstrations that claim to show otherwise inevitably turn out to be rigged. Incidentally, Coriolis effects are the reason why humans have problems with "artificial gravity" at high RPM: the lateral forces from even standing up can be enough to confuse our inner ear and cause vertigo.
* The discussion of rotational motion so far has been as simplified as possible. While it's about as much as anyone needs to know if they're not going on to engineering studies, it's worthwhile to point out some of the complications to prevent things from appearing simpler than they really are.
One of the non-intuitive aspects of angular momentum is that is it a vector quantity, just as linear momentum is. The tricky question is: what is the direction of the angular momentum vector? If a mass is spinning on a cord, then its direction of its motion changes continuously, covering every possible direction in its plane of revolution.
The only direction left is the axis of rotation. There's the second question of whether the direction of angular momentum of an object spinning in the horizontal plane is up or down, but the convention followed is a "right-hand rule". This means that Bob grasps a rotating shaft with his right hand so that his fingers point in the direction of the rotation, then sticks his thumb out, his thumb gives the direction of the angular momentum vector. The direction of the angular momentum vector of a platter spinning counterclockwise on a table is up. Spin the platter clockwise, and the direction is down.
One of the most popular demonstrations of the vector nature of conservation of angular momentum is an experiment often performed in basic physics classes. Alice stands on a platform that is free to rotate and holds a bicycle tire with handgrips on an axle in front of her, with the tire in the vertical plane. Bob uses a power tool of some sort to set the tire spinning rapidly. As long as Alice holds the tire vertical, nothing happens. If she tries to tip it to one side, she starts to spin on the platform in the opposite direction to the rotation of the tire. If she manages to get the tire completely horizontal, she and the platform spin at an angular velocity proportional to the ratio of the moment of inertia of the tire and the moment of inertia of Alice and the platform.
* The vector conservation of angular momentum is also illustrated by a spinning top or gyroscope, which tends to remain upright no matter where it is moved.
Gyroscopes have long been used for autopilots and "inertial navigation" systems, since they provided a reference to establish the motion of an aircraft or other vehicle. Since friction on the gyroscope bearings could affect gyroscope behavior, resulting in a "drift" between the indicated and actual positions, various schemes were used to ensure the least friction possible, including liquid and gaseous bearings. Gyroscopes have been increasingly replaced in such applications by more sophisticated systems using light beams focused in a loop, or sets of micro-machined acceleration sensors. Details of such technologies are a topic for another document.
Gyroscopic action is often used as a stabilization technique. Firearms and artillery generally have "rifling", or spiral grooves in the barrel, to set a projectile spinning when fired. This also helps average out the unbalanced effects of wind resistance due to imperfections in the shape of the projectile. Similarly, spacecraft generally have to maintain a specific orientation in space to perform their mission, and so them are often set to spinning to stabilize them. Such "spin-stabilized" spacecraft will have a communications dish antenna mounted on the spin axis and point the spin axis back to Earth so that constant communications can be maintained. However, they also may need to keep some of their equipment, such as telescopes or communications dishes, pointed at a specific target, and so such gear is mounted on a section of the spacecraft that is mechanically spun to cancel out the effects of the spacecraft's spin. Electrically connecting this confusingly-named "despun" section to the rest of the spacecraft is a tricky matter, requiring devices known as "rotary couplers", but that's another story.
Most modern spacecraft use what is known as "three-axis stabilization" to maintain orientation without spinning. Although three-axis stabilized spacecraft use little rocket thrusters to maintain their orientation, they may also use a set of "reaction flywheels" set in the X, Y, and Z directions to maintain orientation, adjusting the speed of a specific flywheel to transfer angular momentum and change the spacecraft's orientation slightly.

Tops and gyroscopes illustrate one of the most counterintuitive features of vector conservation of angular momentum. Any force that tends to tip the top or gyro to one side sets up a torque that actually moves the top or gyro at a right angle. This is why a top starts going in lazy circles as it burns off its rotational energy through friction. Gravity is trying to pull it over, but the result is to cause the top to "precess" in circles that get wider and wider until the top falls over. There also may be a bit of instability in the precession, with the top performing a wobble or "nutation" as it spins around.
An even more common example is the tendency of a coin to roll away when dropped on a smooth surface instead of simply dropping flat. If the coin has any forward motion when it lands on its edge instead of its face, it tends to roll. That creates angular momentum in the coin that resists the tendency of gravity to pull it over, and it keeps right on rolling. If it doesn't run into something first, it will eventually start to tip and then turn into a tightening spiral that eventually bring the coin flat to rest.
One amusing experiment along such lines is to shake a coin in a transparent plastic food tub, like those used to sell caramel popcorn or the like. It turns out to be easy to get the coin to start rolling around the sides of the tub in a whirring spin, and if the coin is heavy enough, slightly difficult to get it to stop.
BACK_TO_TOP* Having gone through the basic concepts of linear and rotational mechanics, it is useful to introduce a subtlety that would have been too confusing to introduce earlier.
The easiest way to consider this subtlety is to perform a little experiment in rotational dynamics. Suppose Bob hangs a bucket of water on the end of a rope, and then twists the rope so the bucket spins around on its central axis. Centripetal force then causes the water to "climb" up the sides of the bucket and stay there for as long as the bucket is spinning, and when the bucket stops spinning, the water falls back to level again.
Now suppose Bob mounts this bucket on a rigid frame inside a larger, closed container, and fits a camera in the top of the container to record what happens to the water in the bucket. If he spins the container, once again the water will crawl up the sides of the bucket and remain there until the container stops spinning, when it levels out again. If Bob then observes the video taken by the camera, it will show the water sitting flat and level in the bucket, then rising up the sides of the bucket for a time, and then falling back level again. Although the container is closed, the action of the water tells Bob when the container was spinning and when it was not.
The subtle problem is: how does the water in the bucket "know" it is spinning? Gravity? No, gravity pulls straight down on it. The same puzzle arises with simple linear acceleration: motion is a relative concept, but acceleration is not. How does a mass "know" what it is accelerating relative to? Isaac Newton discussed this puzzle in the course of his work, suggesting that there was some sort of "absolute space" that let the bucket "know" it was spinning, or let a mass "know" it was accelerating.
Newton's concept of absolute space was vague, and not long afterward the Irish philosopher, mathematician, and bishop George Berkeley (1685:1753), following ideas put forth by Leibniz, suggested that the distribution of distant stars and other celestial objects defined the structure of space. After all, if the container and the bucket were the only things in the Universe, could they ever spin? What would they spin relative to? If they could only spin relative to each other, what would the result be? The same thought applied to linear accelerations.
Berkeley was far ahead of his era, had some notoriously dubious philosophical notions, and nobody paid him much mind at the time. In the 1860s, the Austrian physicist Ernst Mach (1838:1916) reinvented the idea. He really didn't add much that Berkeley hadn't said -- though Mach did suggest that the same effect would be obtained if the bucket were stationary and the distant stars rotated around it. That was a highly problematic idea that led to complications instead of insights, but in any case Mach agreed with Berkeley that there was no "absolute space", space being defined only by the masses it contained. If the Universe contained less mass, then liquid in a bucket would not rise as far up the walls when the bucket was spun, and if there were no mass in the Universe, the liquid wouldn't rise at all -- in effect, spin wouldn't exist.
This little puzzle is known as "Mach's principle", though it should better be known as the "Berkeley-Mach principle". From the point of view of simple practical physics, it's of little or no interest; it's just the way things work, and will continue to work no matter which way we slice it.
That's why it's only being discussed here as a footnote. The reason it's even being mentioned is as a warning against complacency. As mentioned before, simple physics implies simple models of how the real Universe works. These models can be effective and very useful, and in the best case strip away the clutter of details to focus on the essentials, but the real Universe is substantially more complicated. Anyone who is tempted to become glib about physics needs to understand that on closer investigation, the simple models may not fit the way things actually work in every fine detail. Science, as the saying goes, isn't always an exact science.
BACK_TO_TOP