* The mixed results in Mars exploration during the 1990s led to a reconsideration of tactics, with new missions launched in the 2001, 2003, 2005, 2011, 2013, 2016, and 2018 that proved more successful. Along with a series of orbiters, NASA sent two improved rovers, "Spirit" and "Opportunity", in 2003, and then a much-improved rover, "Curiosity", in 2011. Both India and the ESA also sent their first missions to Mars in this timeframe.
* The failure of the MCO and MPL probes resulted in a complete reassessment of the ambitious Mars exploration missions NASA had planned. In late October 2000, NASA released a preliminary revised Mars plan. The most significant feature was that the goal to send both orbiter and lander missions to Mars in each launch window was abandoned, with the focus now on performing orbiter and lander missions in alternating launch windows. The revised plan envisioned launch of a "Mars Odyssey Orbiter" in the 2001 launch window, two "Mars Exploration Rovers (MER)" in the 2003 window, and a "Mars Reconnaissance Orbiter (MRO)" in the 2005 window.
The Mars Odyssey Orbiter was originally given the working name of "Mars Surveyor 2001" when formal work on the spacecraft began in 1998. The name of "2001 Odyssey" was inspired by Stanley Kubrick's classic science-fiction film, 2001: A SPACE ODYSSEY. NASA carefully avoided use of the acronym "MOO".
Originally a lander was also planned for the 2001 launch window, but as mentioned that program was scrapped after the MCO / MPL fiasco, even though the lander was almost complete. Money saved by scrapping the lander project was used to boost the Odyssey budget. Since development of the Odyssey spacecraft was almost complete as well at that time, the additional funds were used to implement enhanced oversight and testing programs to increase chances for mission success. The nearly complete lander was mothballed, but not scrapped.
Odyssey was intended to observe Mars for two Earth years. Its main mission was to obtain a global map of the elemental composition of the Martian surface, particularly for hydrogen, which would be associated with the presence of water. Odyssey also measured surface radiation levels. Both these objectives were to provide useful data for a potential crewed Mars mission in future decades.
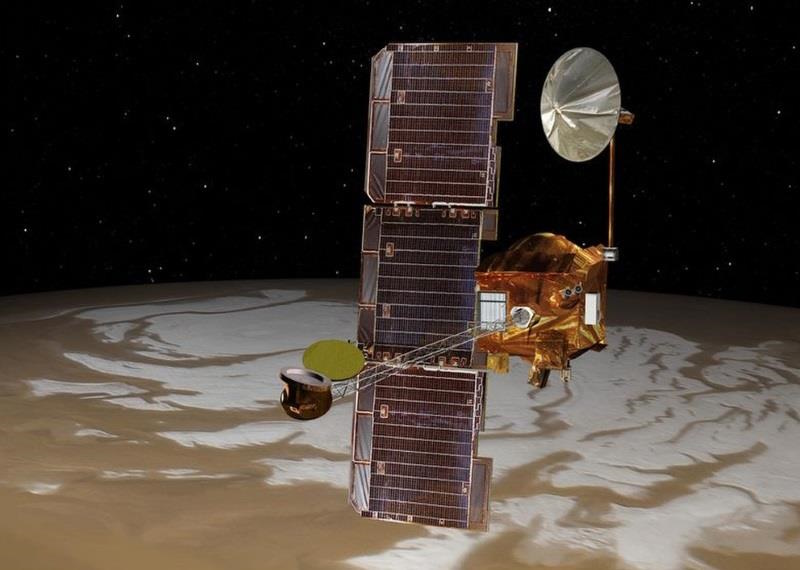
Odyssey was launched on 7 April 2001 on a Delta II 7925 booster. The interplanetary cruise phase went without major trouble, and Odyssey was inserted into Mars orbit on 24 October 2001. This was a great relief after the MCO/MPL fiasco. The NASA Odyssey website featured music composed for the mission by the Greek electronic music composer Vangelis in celebration.
The spacecraft used aerobraking to attain its final Mars orbit, skimming the atmosphere for 273 orbits, while the mission team took preliminary observations to validate the spacecraft's instruments and provide some publicity. The probe was finally placed at an altitude of 400 kilometers in a near-polar Sun-synchronous orbit, with a period of 2 hours. Its orbit brought it over targets in late afternoon on the day side of the planet and shortly before dawn on the night side of the planet.
Odyssey had a launch mass of 758 kilograms. The spacecraft's instrument payload included:
The orbiter had a RAD6000 computer. The high resolution of the thermal emission imaging system translated to high data rates. Some data processing was performed on board the spacecraft, but most of the data was collected for daily data dumps and compressed before download to Earth stations at rates varying from 14 to 110 kilobytes per second.
Odyssey was damaged by an intense solar storm that occurred on 28 October 2003 that knocked out the radiation analysis instrument, but the rest of the spacecraft remained operational, and by the summer of 2004 the orbiter had completed its primary mission. It continues to perform observations, at last notice having broken records as the longest-serving NASA spacecraft in orbit around another planet.
BACK_TO_TOP* On 10 June 2003, a Delta II 7925 booster launched the first "Mars Exploration Rover (MER-A)", named "Spirit", on a mission to land on and explore the surface of Mars. The lander set down on 3 January 2004 near Gusev Crater, 15 degrees south of the Martian equator. MER-A was followed into space on 8 July 2003 by "MER-B", named "Opportunity", which landed on Mars on 24 January 2004, setting down in Meridiani Planum, two degrees below the Martian equator and on the other side of Mars.
Each MER flew to Mars in a planetary cruise stage similar to that used by Mars Pathfinder / Sojourner, but larger. The cruise stage was about 2.6 meters in diameter and 1.6 meters tall, with solar panels and communications antennas on one side, and two hydrazine fuel tanks and an entry aeroshell on the other.
The cruise stage spun at about 2 RPM, which provided a little "artificial gravity" to allow fuel to flow to thruster assemblies on each side of the cruise stage. Each assembly had four thrusters, with the two working together to provide pitch-yaw-roll control and minor course corrections. The rim of the cruise stage was also fitted with a Sun sensor and a star sensor for orientation and navigation.
The solar arrays on the cruise stage provided about 600 watts at the beginning of the flight and 300 watts at the end. The rover's computer system ran the cruise stage, and the cruise stage included a cooling system to keep the computer operational inside the aeroshell. The freon-based cooling system consisted of a loop of pipe running from inside the aeroshell to rim-mounted radiators.
The aeroshell was used to protect the system during entry into the atmosphere of Mars. After entry, the aeroshell was discarded and the lander system deployed a parachute with a diameter of about 15 meters. The lander was also similar to that of Pathfinder / Sojourner, with a tetrahedral assembly that inflated six airbags on each face before landing, the airbags being deflated and pulled under the lander before it unfolded.
The lander also included communications subsystems to relay telemetry on the landing back to Earth. The lack of a landing telemetry system was recognized as one of the problems with the Mars Polar Lander. In fact, the entire MER program was conducted in a substantially more robust fashion than the MCO / MPL effort, and ended up with an appropriately higher pricetag.
The MER rovers themselves were similar in configuration to the Sojourner rover carried by Mars Pathfinder, being six-wheel-drive robot vehicles, but much larger, 1.6 meters long and weighing 174 kilograms. Each MER was controlled by a RAD6000 processor, with 128 megabytes of RAM and 256 megabytes of nonvolatile flash memory. This processor was also used to control the interplanetary cruise stage. Each rover featured a mast to view its surroundings, and a robot arm for sample collecting. Power was provided by a "roof" panel tiled with gallium arsenide solar cells, with a maximum power output of 120 watts and a lithium battery energy storage system. Small radioisotope heaters were included to help keep critical systems from freezing up.
The MER rovers were fitted with eight cameras for navigation and terrain observation. There were dual "Hazard Avoidance Cameras (HazCams)" on the front and the rear, plus a dual "Navigation Camera (NavCam)" on the mast head, shared with a dual "Panoramic Camera (PanCam)". They were all CCD imagers with a resolution of a megapixel, the PanCam obtaining color images through the use of color filters, and the others obtaining grayscale images. The mast also carried an infrared / thermal-emission spectrometer.
The robot arm was fitted with an end assembly with a rock-abrasion tool, a microscopic CCD grayscale imager, an APXS, and a Mossbauer spectrometer -- this last being a gamma-ray spectrometer, with a radioactive source to stimulate samples so they would generate gamma rays. Each MER carried a DVD storing four million names of people who responded to a NASA campaign to name the rovers.
* The landings of the two MERs attracted a great deal of public attention. One cartoonist had the rovers returning images of rocks and landscapes from Mars -- as well as elusive master terrorist Osama bin Laden. Communications were lost with Spirit for a day or so in late January during its preliminary checkout period, but telemetry was finally regained, with ground controllers putting the rover in a troubleshooting mode to make sure it didn't decide to go out to lunch again. The trouble was a software error that accumulated trash data in the flash memory system; a fix was carefully designed and implemented.
The rovers were able to move up to 100 meters of terrain during daylight hours, over a total range of about a kilometer, and had a semi-autonomous navigation system that allowed them to get around without continuous control from Earth. The rovers went to "sleep" during each night. At the beginning of each martian day, or "sol", commands and data were transferred directly to Earth over an X-band communications link. Each rover also had a UHF antenna to relay the greater volumes of science data through the Mars Global Surveyor and Mars Odyssey orbiters twice each afternoon. JPL operated two shifts, with each shift dedicated to one rover; the shifts had gradually sliding work schedules since the Martin sol isn't exactly the same length as the Earth day.
As it turned out, the choice of landing sites was astute. Opportunity's landing site in Meridiani Planum was a small crater whose floor was littered with small mineral spheres. Very fortunately for the science team, there was an outcropping of bedrock, the first to be available for inspection by any Mars mission, and the outcropping was embedded with large numbers of these "blueberries" as well. Careful analysis showed the blueberries were made of a high proportion of salts and were almost certainly concretions from liquid water, which had been widespread in the region in the distant past.
Spirit's landing site, Gusev Crater, had been selected since there was some thought that it had been an ancient lake. No evidence was found of water activity there, but on inspection the area seemed like fairly typical Martian terrain, making it a good "control" for Opportunity's observations.
The MERs celebrated their first (Earth) year in operation in January 2005, with both rovers still in very good operating condition. Given the harsh Martian environment, their survival was a testimony to sound engineering, proving NASA had successfully come a long way from the MCO / MPL fiasco.
There was a bit of a scare on 26 April 2005, when Opportunity ran into a sand dune and ended up bogged down, spinning its wheels. The mission team spent a month very carefully withdrawing the rover from its "sandtrap", and it finally freed itself on 3 June. Procedures were developed to help prevent running into a similar trap in the future. New software was downloaded in 2006, allowing them to spot clouds and dust devils in their imagery, then pass the relevant images on to Earth. Previously, researchers had to wade through streams of imagery to hunt for such phenomena.
Spirit got caught in another sandtrap in May 2009. NASA controllers struggled to free the rover, but in January 2010, they conceded defeat. Communications with Spirit ceased in March 2010, though the mission control team continued to listen for the machine's revival; hearing nothing, the rover was abandoned in May 2011. Opportunity lasted until June 2018.
* One of the footnotes to the MER landings was that they provided clues to the fate of the unlucky Mars Polar Lander. After loss of the MPL in late 1999, the Mars Global Surveyor imaged MPL's landing zone, finding a white patch that might be a parachute and what looked like a disturbed spot with a bright dot at the center where the lander came down, but the imagery was ambiguous. MGS observations of the MER landing sites yielded images that were consistent with the supposed MPL images, with surface feature corroboration by the MER rover observations. The MGS team has developed a new high-resolution imaging scheme and wants to take more shots of the MPL landing area.
* Days before the launch of the two MER rovers, the ESA had begun Europe's first Mars mission, named "Mars Express (MEX)", launched on 2 June 2003 by a Russian Soyuz Fregat booster from Baikonur. MEX consisted of an orbiter and a small British-built lander named "Beagle 2".

MEX was the first ESA "Flexi" project. Flexi projects were defined as fast track, low cost missions, and at 150 million Euros ($127 million USD), the MEX orbiter was the cheapest Mars spacecraft made to that time. It featured instrument designs from the ill-fated Mars 96 probe, and used off-the-shelf components whenever possible. The Beagle 2 lander cost an additional 50 million Euros ($43 million USD). Total system launch weight was only 1,070 kilograms.
MEX successfully went into Mars orbit on 25 December 2003. The probe was placed in a highly elliptical polar orbit with a perigee of 250 kilometers, an apogee of 10,240 kilometers, and a period of 6.7 hours. From orbit, it performed observations to search for water, as well as signs of present or past life. Despite its low cost, MEX was a highly sophisticated spacecraft, the instrument payload including:
It also had a relay system to support Beagle 2 and other landers. MEX had a dual-processor system with a 1.5-gigabyte data buffer to allow accumulation of data between Earth downloads. The orbiter was designed for a two-Earth-year mission, but was expected to operate as part of the Mars Relay Network for substantially longer. Although MEX is showing its age, with reduced power and capability along with occasional dropouts, at last notice it continues its observations.
* The British Beagle 2 lander was something unusual for Britain, which has traditionally given space a low funding priority. Money for the project was obtained from the scientific and academic community with some corporate sponsors. The idea was conceived in 1997 by Professor Colin Pillinger of the Open University at Milton Keynes in the UK. He promoted the idea at an ESA meeting, and then a meeting of the British Royal Society in London. The project was approved by the ESA in 1999 and implemented by a team at the Open University.
The lander's name, of course, was in honor of the HMS BEAGLE, the British Royal Navy sailing ship that took Charles Darwin on his epic voyage of discovery in the 19th century. Beagle 2 was designed to search for water and signs of life. The original design concept was a truncated pyramid with a system launch weight of 100 kilograms, but it was redesigned into a flat disk configuration, resembling a large pocket watch in closed configuration, with a system launch weight of 60 kilograms. The lander itself weighed 32.7 kilograms, with almost a third of that instrument payload, an unusually high ratio.
The Mars Express orbiter ejected Beagle 2 on 19 December, and on 25 December the probe fell into the Martian atmosphere, protected by an ablative aeroshell built by the European Aerospace & Defense Systems (EADS) company, now Airbus Defense & Space. It was to deploy a pilot parachute to slow down, discard the aeroshell, then deploy a main parachute. It would touch down using an airbag system, then deploy itself.
In deployed configuration, Beagle 2 resembled a flower with five petals, one of the petals being the main lander bus, and the other four petals and the central element being covered with solar panels. Beagle 2 carried a capable ultra-miniaturized science payload, divided into two subsystems, the "Gas Analysis Package (GAP)" and the "Position Adjustable Workbench (PAW)".
GAP was a mineral sample analysis instrument, consisting of:
PAW was a 75-centimeter-long robot arm. It was originally intended only for sample collection, but ultimately it carried an entire science instrument module, with seven instruments as well a brush, scoop, and wide-angle mirror. The seven PAW instruments included:
Beagle 2 communicated with Earth through the Mars Relay Network. Unfortunately, contact with Beagle 2 was lost after it entered the Martian atmosphere on Christmas Day 2003, and the probe was a loss. Although the design team had proudly announced how the project had been put together on a shoestring with considerable non-governmental backing, in hindsight that didn't turn out to be a virtue. A study on the project concluded that Beagle 2 had been overpromoted, underfunded, and under-managed -- the report was scathing, stopping just short of calling it a "science-fair project". The recommendations were for a more robust approach to any follow-on.
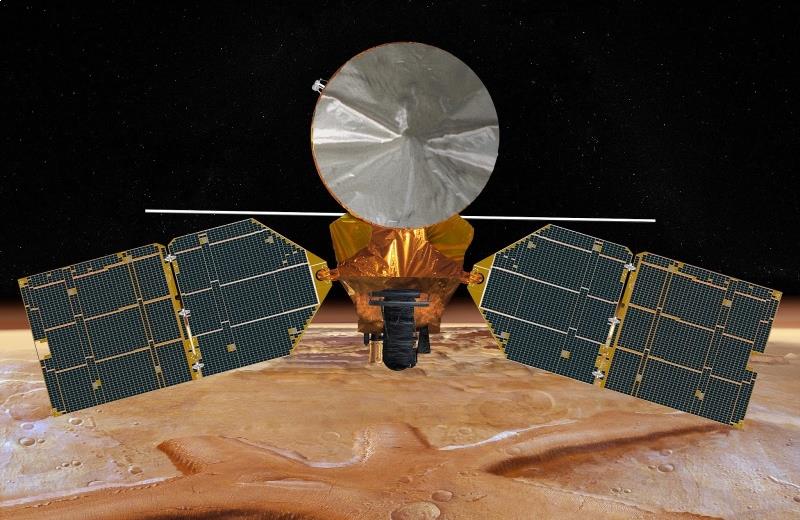
BACK_TO_TOP* On 12 August 2005, the NASA Mars Reconnaissance Orbiter (MRO) was launched from Cape Canaveral on an Atlas 5 booster. The MRO was substantially larger than the Mars Global Surveyor and Mars Odyssey Orbiter. It had a launch mass of 2,175 kilograms, twin solar arrays with a width of 6 meters each and spanning 13.4 meters across the spacecraft bus, and an instrument payload of unprecedented sophistication:
It had a RAD750 computer -- a descendant of the RAD6000, but an order of magnitude faster -- along with 20 gigabytes of flash memory. Since the orbits of both Earth and Mars are slightly elliptical, not all Mars launch windows are equally favorable. The most optimum windows are when Earth is at its aphelion, or farthest part of its orbit, at mission launch, and Mars is at its perihelion, or nearest part of its orbit, at mission arrival. The least optimum windows are when the circumstances are reversed. The relatively large Atlas 5 booster was needed since the 2005 launch window was less optimal than usual.
The probe arrived at Mars in early March 2006 and went into a 48,000 x 300 kilometer preliminary orbit. The spacecraft used an unusual "Mars Orbit Injection (MOI)" engine system. Traditionally, space probes have used a single big "bipropellant" engine burning hydrazine and nitrogen tetroxide for orbital injection, but the MOI consisted of six smaller "monopropellant" engines, burning hydrazine broken down by a catalyst, aided by the smaller spacecraft monopropellant thrusters. The MOI weighed more than a bipropellant system because monopropellant propulsion isn't as efficient in generating thrust, but the monopropellant system was much simpler and more reliable.
After orbital injection, MRO used aerobraking over the next six months to descend into its 225 x 320 kilometer operational orbit, with the big solar arrays reinforced to permit their use as drag panels. This was an unusually low orbit, providing maximum resolution for MRO's instruments. The spacecraft's signals and orbital path were monitored to provide gravitational and upper atmosphere data. The spacecraft reached final orbit on 11 September 2006, and was returning low-orbit pictures of unprecedented detail with the high-resolution camera by the end of the month. At last notice, MRO was still in operation.
MRO sent an order of magnitude more data back to Earth than any Mars orbiter before it. To support the high data rates, the probe was fitted with a high-bandwidth communications system featuring a 3-meter dish antenna, capable of providing data rates of up to 5.6 megabits per second, one to two orders of magnitude greater than the previous generation of probes. The MRO also joined the Mars Relay Network to support later Mars lander missions.
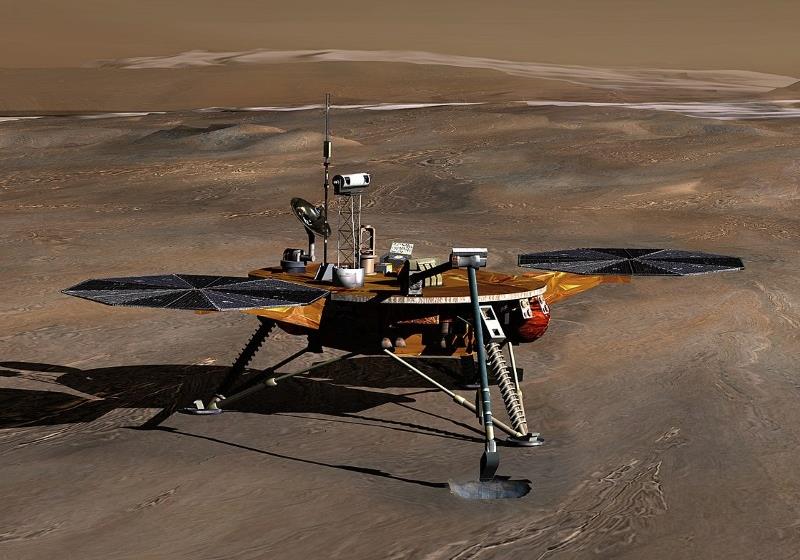
* NASA has conducted a set of low-cost "Scout" missions to support Mars exploration. The first Scout mission, a Mars lander named "Phoenix", was selected in the summer of 2003. The name was selected because the lander was the same one that had been built to be launched in 2001, only to be canceled. Lockheed Martin had kept the nearly-complete lander in environmentally-controlled storage since that time.
Phoenix was launched by a Delta II 7925 booster and landed near the Martian north pole on 26 May 2008. The science payload included:
The lander had a RAD6000 computer. The stereo panoramic camera and thermal evolved gas analyzer were improved versions of those flown on the ill-fated MPL, and like the MPL, Phoenix used a conventional retrorocket system, not an airbag system, to perform its landing. Of course, improvements were added, such as a "smart" landing system that allowed it to navigate its landing away from obstacles. The lander was intended to return three months of observations, but it continued to operate up until 2 November 2008, when transmissions ceased. Attempts to regain contact were performed up to the spring of 2010, when they were finally abandoned.
* NASA had considered sending a small drone aircraft to Mars for surface exploration to commemorate the centennial of the first flight of an aircraft by the Wright Brothers in 1903, but the program was delayed and then suspended in the wake of the MCO/MPL fiasco. The French CNES space agency, which is also interested in small Mars missions, had planned to send a balloon to Mars on the ill-fated Russian Mars 96 probe to perform long-range surface exploration, but it didn't make the payload manifest, which was just as well.
BACK_TO_TOP* NASA had wanted to send a large rover named the "Mobile Science Laboratory (MSL)" in the 2007 launch window, but budget constraints slipped the mission out to the 2011 window. The MSL lander and rover, which was named "Curiosity" in 2009, was launched by an Atlas V 541 booster on 26 November 2011, with touchdown on Mars on 6 August 2012.

The MSL was the next step up in rover capability. It was a vehicle as large as a military jeep, weighing about 850 kilograms, able to roam over the Martian surface for about two Earth years. Costs were appropriately greater, given as about $1.5 billion USD.
The MSL set down on the Martian surface using a new NASA high-precision entry, descent, and landing (EDL) system that placed it to within 6 kilometers of an intended target, in contrast to the 150 kilometer error for earlier landing systems. The EDL system had an aeroshell with a small trim tab at the base for guidance during the entry phase, which was followed by deployment of a two-stage parachute system and discard of the aeroshell. It used a "skycrane" landing system instead of airbags, which would not have been effective for such a large probe. The skycrane platform descended to about 5 meters altitude and hovered on thrusters while it lowered the rover on tethers, using radar to keep the ground under observation. Once the rover was released, the platform boosted away from the landing area and crashed.
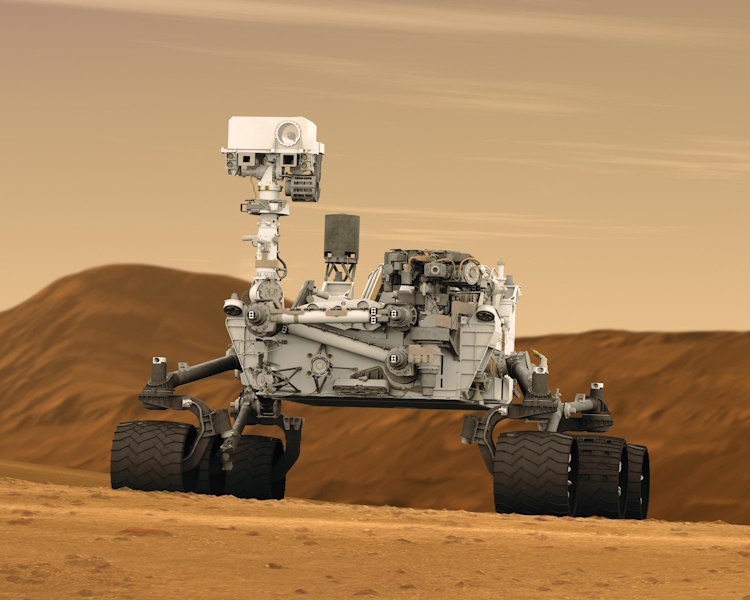
The rover had six wheels and a robot arm, along with a sensor turret on a mast. It had dual communications systems, one to relay through Mars orbiters, the other to communicate directly with Earth. It had a set of cameras to allow it to see where it was going and around it, including:
Other payloads on the rover included six instruments:
Power was provided by an RTG. As with the Viking lander RTGs, the MSL's RTGs had a thermal radiator system specially designed for operation in a planetary atmosphere. There was some brainstorming about having MSL carry a small legged robot that could walk into terrain too difficult for the rover itself to negotiate, with the robot returning images and taking samples. The robot was not included with MSL, but the idea remains an interesting option for later rovers. At last notice, MSL remained in operation.
* The Russians also attempted to launch a sample-return flight to Phobos in the 2011 Mars window. The "Phobos-Grunt" sample return probe -- "Grunt" means "soil" in Russian -- weighed 13.2 tonnes fully fueled. It consisted of a four-legged cruise / lander stage, which was to take a core a meter deep into the surface of the little moon, then put the core into a return stage mounted on top of the lander, which would take the core sample back to Earth. The lander had a suite of about 20 instruments, provided by an international team of researchers.
The Chinese contributed a Mars orbiter, the "Yinghuo 1 (FireFly 1)", a 110-kilogram smallsat carried along with the Phobos-Grunt spacecraft. Yinghuo-1, the first Chinese planetary probe, was to be placed in a highly elliptical orbit around the Red Planet; it was to take images of the planet's surface, but its primary mission was to examine the space environment around Mars. Unfortunately, after launch on 11 November 2011 by a Zenit 2FG booster, the upper stage failed to relight and never left Earth orbit, reentering in early 2012. The Great Galactic Ghoul had struck again.
* There were two Mars launches in the 2013 launch window. ISRO began India's first deep-space probe, the "Mangalyaan" (Sanskrit for "Mars Craft") Mars Orbiter Mission (MOM) on 5 November, using a PSLV booster launched from Sriharikota. The MOM had a launch mass of 1,335 kilograms and carried a suite of five instruments with a total mass of about 15 kilograms, including:
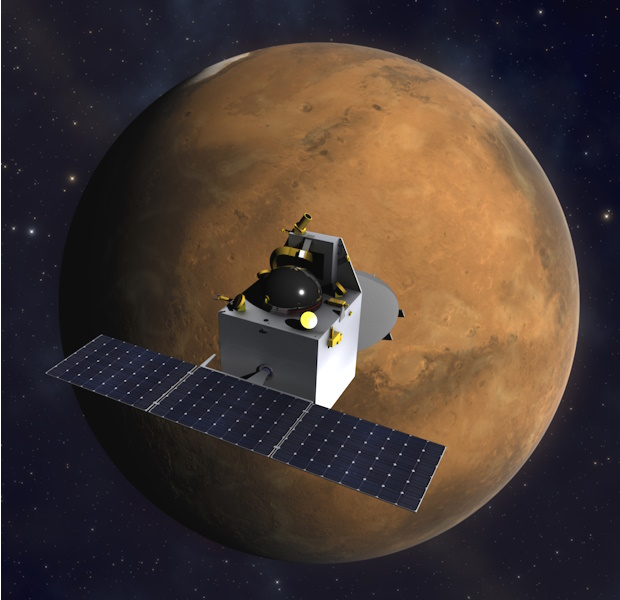
MOM was placed in an elliptical Earth orbit, the spacecraft's propulsion system gradually bringing it up to escape velocity over a month's time, departing on 1 December 2013; it arrived in Mars orbit on 24 September 2014, 299 days after launch. The unusual flight profile was due to launch on the PSLV booster instead of the more powerful GSLV booster, the GSLV not being mature enough to make it worth the risk to the mission. Contact with MOM was finally lost in October 2022.
The NASA "Mars Atmosphere and Volatile Evolution (MAVEN)" followed on 18 November, being launched from Cape Canaveral by an Atlas 5 booster. MAVEN was designed to study the upper atmosphere of Mars and determine the role the loss of atmospheric gas to space has played in changing the Martian climate through time. MAVEN had a launch mass of 900 kilograms and was derived from the Mars Reconnaissance Orbiter. MAVEN's instrument suite included:

It featured a RAD750 computer. As with MRO, MAVEN was capable of aerobraking, both for orbital insertion and for a series of shallow dips into the upper Martian atmosphere for samplings. It arrived in Mars orbit on 22 September 2014, to finally reach operational orbit two months later. At last notice, it was still in operation.
BACK_TO_TOP* In 2001, the ESA established a planetary exploration program named "Aurora" to send probes to Mars, the Moon, asteroids, and other worlds in the solar system. In principle, Aurora's first major mission was to be "ExoMars", envisioned as a Mars orbiter carrying lander or rover systems to be launched by an Ariane 5 or Proton booster in the 2009 Mars window. The ExoMars program ran into the usual sorts of snags but finally, on 14 March 2016, a Proton M Breeze M booster was launched from Baikonur to loft the "Exobiology on Mars Trace Gas Orbiter (ExoMars TGO)", with its "Schiaparelli" AKA "Entry Demonstrator Module (EDM)" lander, on a trajectory to the Red Planet.

The orbiter and lander composite amounted to one of the biggest ever sent to Mars, at about 4,332 kilograms, and measuring about the size of a moving van. The TGO carried a payload of four instruments to study the surface and atmosphere of Mars:
Schiaparelli was battery-operated, and was to only operate for four days on the surface of Mars; the lander's main function was as a technology demonstrator for an ESA rover, due for launch in the 2020 launch windows. Schiaparelli's instrument suite included:
The orbiter arrived into Mars orbit on 16 January 2017; it ejected the Schiaparelli lander three days before arrival. The orbiter entered Mars orbit the same day the lander enters the Martian atmosphere. Protected by a heat shield during entry, the lander was to descend using a supersonic parachute and braking rockets, and touch down in Meridiani Planum -- a broad, relatively flat region that has already been explored a bit by NASA's Opportunity rover. Unfortunately, contact with the lander was lost during its Mars entry; orbital observations later confirmed it had crashed.
The orbiter's initial orbit was highly elliptical, ranging from about 300 to 95,000 kilometers. It then performed a series of aerobraking maneuvers to lower into a circular orbit with an altitude of 400 kilometers, with an inclination of 74 degrees to the Martian equator.
The orbiter's five-year mission began in late 2017, with the spacecraft mapping the planet with its stereo camera, and analyze the gases making up the Martian atmosphere, with a focus on methane. In addition, it served as a relay to handle communications of landers and rovers with the Earth. The methane question has puzzled scientists for more than a decade, since MEX found traces of the gas in the Martian atmosphere in 2004, a surprise discovery that immediately led researchers to ask if Mars was still biologically or geologically active. The methane signal later disappeared, but not before ground-based observatories detected the gas. The Curiosity rover also sensed a brief spike in methane in the air at its landing site.

The mission was originally conceived as an ESA-NASA effort, with the US providing Atlas 5 boosters for the mission. NASA was forced to pull out after budget cuts in 2012, though the agency did provide UHF radios for communications with landers and rovers.
* Although NASA gave up on the Scout series, the agency's low-cost Discovery program continued, with a Mars shot selected in 2012 named the "Interior Exploration Using Seismic Investigations, Geodesy, & Heat Transport (INSIGHT)" mission. It was originally to be launched in 2016, but it was delayed, being finally launched by an Atlas 5 booster from Vandenberg Air Force Base in California on 5 May 2018 -- this being the first planetary probe to be lofted from Vandenberg. It safely touched down on Elysium Planitia on 26 November 2018.
INSIGHT was based on the Phoenix lander, and was also built by Lockheed Martin. INSIGHT had an overall launch mass of 694 kilograms, consisting of an interplanetary cruise vehicle carrying a lander with a launch mass of 358 kilograms. The lander was powered by twin solar arrays, with its primary experiment being a French-made seismometer, along with a German-made drill to bore as deep as 5 meters into the soil for temperature measurements. The lander also featured a weather station, a robot arm, two monochrome cameras, and a magnetometer -- the first to be actually landed on Mars. In addition, it was fitted with a laser retroflector array, to allow Mars orbiters to pinpoint its location, as well as two silicon chips with several million names, listing the supporting public, micro-etched into them by electron beams.

An RSX provided precision data on the rotation of Mars. Along with the seismometer readings, the variations in rotation gave clues about the interior of Mars. The INSIGHT seismometer system could determine the epicenters of marsquakes; on Earth, that requires three separated seismometer stations to triangulate the location, but on Mars, the lack of oceans means that a marsquake wave will circle the planet repeatedly, meaning the INSIGHT seismometer picked up the signals multiple times, going in different directions, yielding a location.
The launch also included two "nanospacecraft" named "Mars Cube One A" and "Mars Cube One B" -- both based on the popular "CubeSat" nanosatellite format, made up of multiples of a cube 10 centimeters on a side. The "MarCO" nanospacecraft were "six-unit (6U)" spacecraft, the size of six basic CubeSat modules, in a 3x2 format, about the size of a box of breakfast cereal. They fly near Insight, to perform a flyby of Mars. Their only instrument was a camera, the flight being intended as a test of the nanosat scheme, particularly its long-range communications link. They were intended to relay data from the lander during its descent.
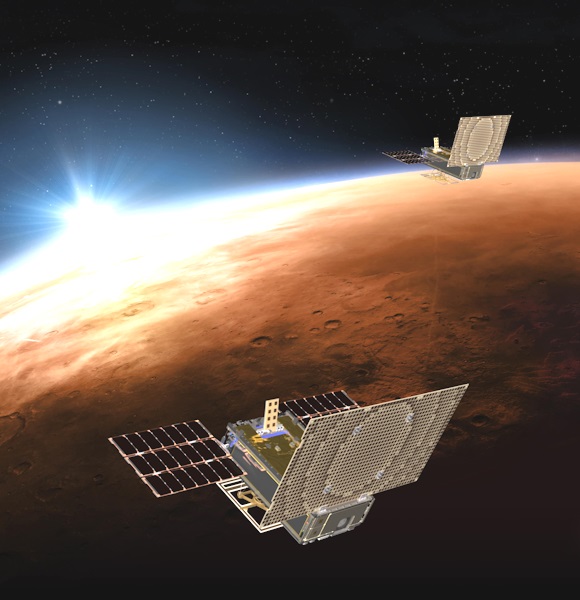
INSIGHT successfully landed on Mars on 26 November 2018, with the MarCO CubeSats working as intended. It continued to return data until late 2022, when contact was lost and the mission was declared over.
BACK_TO_TOP